Le schéma cinématique de la partie opérative du MAXPID
Le schéma cinématique de la partie opérative du MAXPID est le suivant :
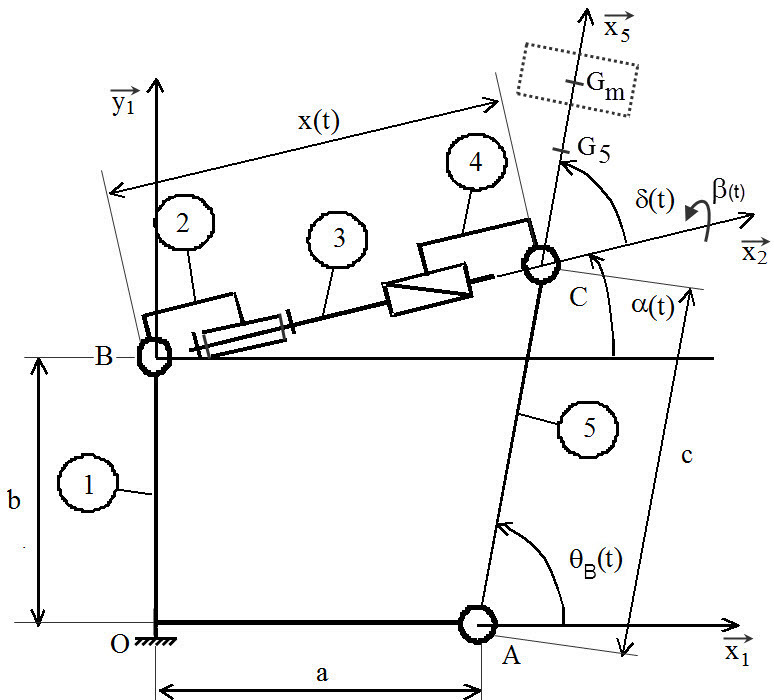
Avec le paramétrage :
OA = a = 70 mm ; OB = b = 80 mm ; AC = c = 80 mm ;
BC = x(t) ;
Le pas de la liaison hélicoïdale est p = 4 mm/tour ;
\(\theta_ B (t) = \left(\overrightarrow{x_1},\overrightarrow{x_5} \right) =\left(\overrightarrow{y_1},\overrightarrow{y_5} \right)\), \(\beta (t) = \left(\overrightarrow{y_2},\overrightarrow{y_3} \right) =\left(\overrightarrow{z_2},\overrightarrow{z_3} \right)\), \(\omega_m (t) = \frac{d \beta (t)}{dt}\)
\(G_5\) représente le centre de gravité de la pièce 5, il est tel que : \(\overrightarrow{AG_5} =x_{G_5}. \overrightarrow{x_5}\) avec \(x_{G_5} = 105 [mm] \). Le bras a un volume de \(155290 mm^3\). Il est en acier de densité \(7,8\).
\(G_m\) représente le centre de gravité des masses fixées au bout du bras 5, il est tel que : \(\overrightarrow{AG_m} =x_{G_m} .\overrightarrow{x_5}\) en fonction du nombre de masses ce sera à vous de déterminer \(x_{G_m} \)et la masse totale supportée en bout de bras. Une masse pèse \(m_m = 650 [g]\)
Représentation 3D :

Conseil : Il faut faire ce travail si vous ne l'avez encore jamais fait !
Refaire les schémas cinématiques plan et spatial du MAXPID en utilisant une couleur différente par pièce est un bon exercice qui vous permettra de mieux comprendre les mouvements relatifs entre les pièces.
Utiliser le même jeux de couleurs pour les schémas cinématiques plan et spatial.
Ne pas hésiter à se rapprocher d'un des deux robots pour bien faire le lien entre les représentations et le système réel.
Ne pas hésiter à me poser des questions ! Vous devrez faire ce travail et le présenter lors de l'épreuve de TP de S2I des concours.