Stratégie d'isolement
L'objectif de cette partie est de déterminer l'action fournie à l'effecteur de chaque chaîne d'énergie-puissance d'un mécanisme en chaîne ouverte à l'équilibre
Pour qu'un mécanisme en chaîne ouverte soit contrôlé en position, vitesse et effort, un actionneur est généralement placé en parallèle de chaque liaison. Il y a alors autant de chaînes d'énergie-puissance que de degrés de liberté dans les liaisons du mécanisme.
Exemple : Le robot ERICC
Le robot ERICC comporte 5 degrés de libertés.
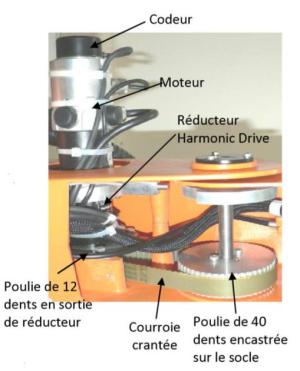
Pour motoriser (imposer le mouvement) de chacun des degrés de liberté, le constructeur a mis en place une chaîne d'énergie puissance. ici des moteurs électriques et des réducteurs de vitesse. Il a également implanté des capteurs pour pouvoir mesurer les paramètres de position de chacun des axes.
L'image ci-dessous présente la chaîne d'énergie puissance + les capteurs pour motoriser l'angle \(\theta_3\).

Méthode :
Pour déterminer les actions fournies aux effecteurs de chaque chaîne d'énergie-puissance afin de la maintenir en équilibre dans une position imposée, il faut :
isoler l'extrémité de la chaîne ouverte en conservant l'actionneur à dimensionner comme action extérieure. Cela revient à choisir une frontière d'isolement qui coupe la liaison en parallèle de l'actionneur à dimensionner ;
si le degré de liberté de la liaison en parallèle de l'actionneur à dimensionner est :
une translation à trajectoire rectiligne : appliquer le théorème de la résultante statique en projection sur la direction de la translation,
une rotation : appliquer le théorème du moment statique, en un point de l'axe de rotation, en projection sur la direction de l'axe.
Attention :
On n'isole jamais le bâti. Car vous n'aurez pas assez de toute votre vie pour réaliser le bilan des actions mécaniques extérieures !