Modélisation du moteur avec Scilab/XCos
En fonction du temps qu'il vous reste,
Soit vous réaliser le schéma-bloc complet du moteur sur Scilab/XCos
Soit vous télécharger le corrigé (voir réponse de la question suivante)
Question
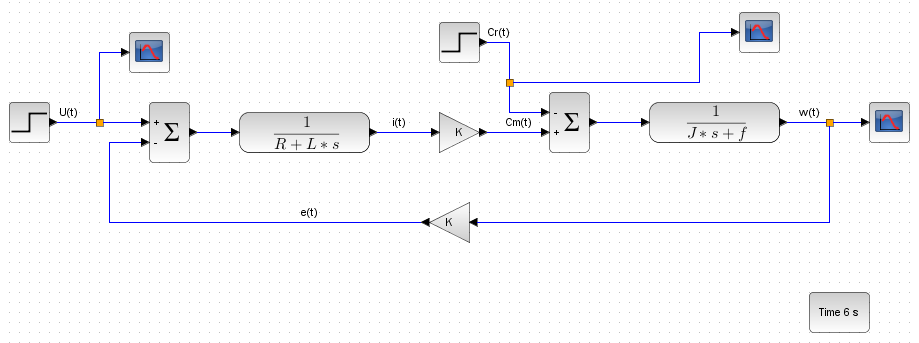
Élaborer le schéma-bloc complet du moteur sur Scilab/XCos, en utilisant le langage formel et non pas les valeurs numériques :
\(R\), \(L\), \(K\), \(f\) et \(J\) pour les coefficients à l'intérieur des différents blocs ; Pour les valeurs voir Les caractéristiques du moteur à courant conitnu.
On veut appliquer
la tension \(U(t) \) (le paramètre de commande) aux bornes du moteur :
si \(t<0s\), \(U(t)=Ui=0 (V)\)
si \(t \geq 0s\), \(U(t)=Uf=3 (V)\)
le couple résistant \(Cr(t) \) (la perturbation) :
si \(t<3s\), \(Cr(t)=Cri=0 (N.m)\)
si \(t \geq 3s\), \(Cr(t)=Crf=2.10^{-3}(N.m)\)
Cette question ne doit pas vous prendre beaucoup de temps, l'objectif :
n'est pas de réaliser la modélisation par schéma bloc d'un moteur, nous l'avons déjà fait en TD !
n'est pas de maîtriser la réalisation de schémas blocs sur Scilab/XCos !
L'objectif est d'utiliser Scilab/SCos pour analyser les courbes de simulation obtenues.
N'hésitez pas à regarder l'indice, voir à télécharger la solution de cette question.
Indice
Voici le schéma bloc à réaliser sous XCos :
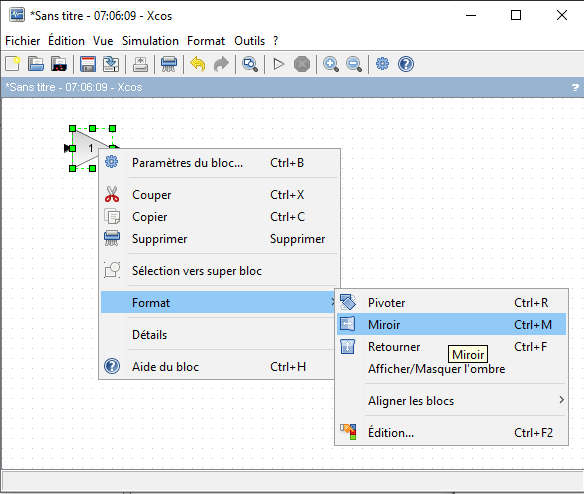
Pour changer l'orientation d'un bloc :
Le sélectionner
Faire un clic droit, un menu contextuel apparaît
Cliquer sur format, sélectionner l'orientation voulue :

Question
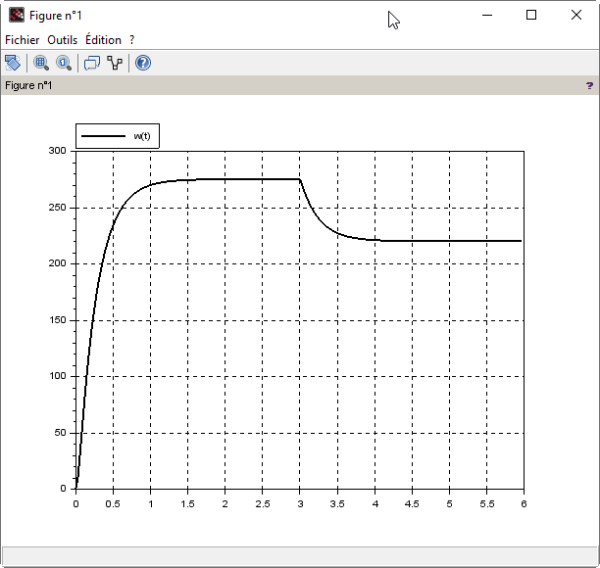
Réaliser la simulation, observer la courbe obtenue.
Si on souhaite maîtriser (imposer) la vitesse de rotation du moteur quelque soit les perturbations extérieures, que pensez vous d'une commande en chaîne directe ?
Une commande en chaîne directe consiste à imposer toujours la même tension aux bornes du moteur.
Indice
Vous devriez obtenir la courbe suivante :
Solution
Si on impose toujours la même tension aux bornes du moteur, la vitesse de rotation de ce dernier va fluctuer au gré des perturbations auquel il est soumis.
Ce type de commande ne permet pas de maîtriser la vitesse.